




Zazębienie ślimaka ewolwentowego i koła zębatego śrubowego ewolwentowego jest szeroko stosowane w przekładniach małej mocy. Ten rodzaj zazębienia jest stosunkowo łatwy w projektowaniu i produkcji. W produkcji, jeśli dokładność części jest nieco niska lub wymagania dotyczące przełożenia nie są zbyt rygorystyczne, jest to również dobra metoda doboru.
Obecnie ten rodzaj pary przekładni nie jest uwzględniany w ogólnych danych projektowych, ponieważ jego teoria nie jest jeszcze w pełni dojrzała.
Ten rodzaj zazębienia to typowa para przekładni punktowych. Z mikroskopowego punktu widzenia, naprężenia lokalne są duże, a sprawność niska. Na szczęście moment obrotowy przekładni jest niewielki, a wymagania dotyczące sprawności niskie. Dlatego jest to rozwiązanie bardzo atrakcyjne dla rynku. Taka konstrukcja pozwala uniknąć wielu problemów występujących w produkcji i montażu przekładni ślimakowych.
W artykule tym omówiono przede wszystkim przedstawienie tego rodzaju pary styków poruszającej się wzdłuż kierunku normalnego w bardzo małym zakresie, wykorzystując animację w kierunku ruchu punktu styku.
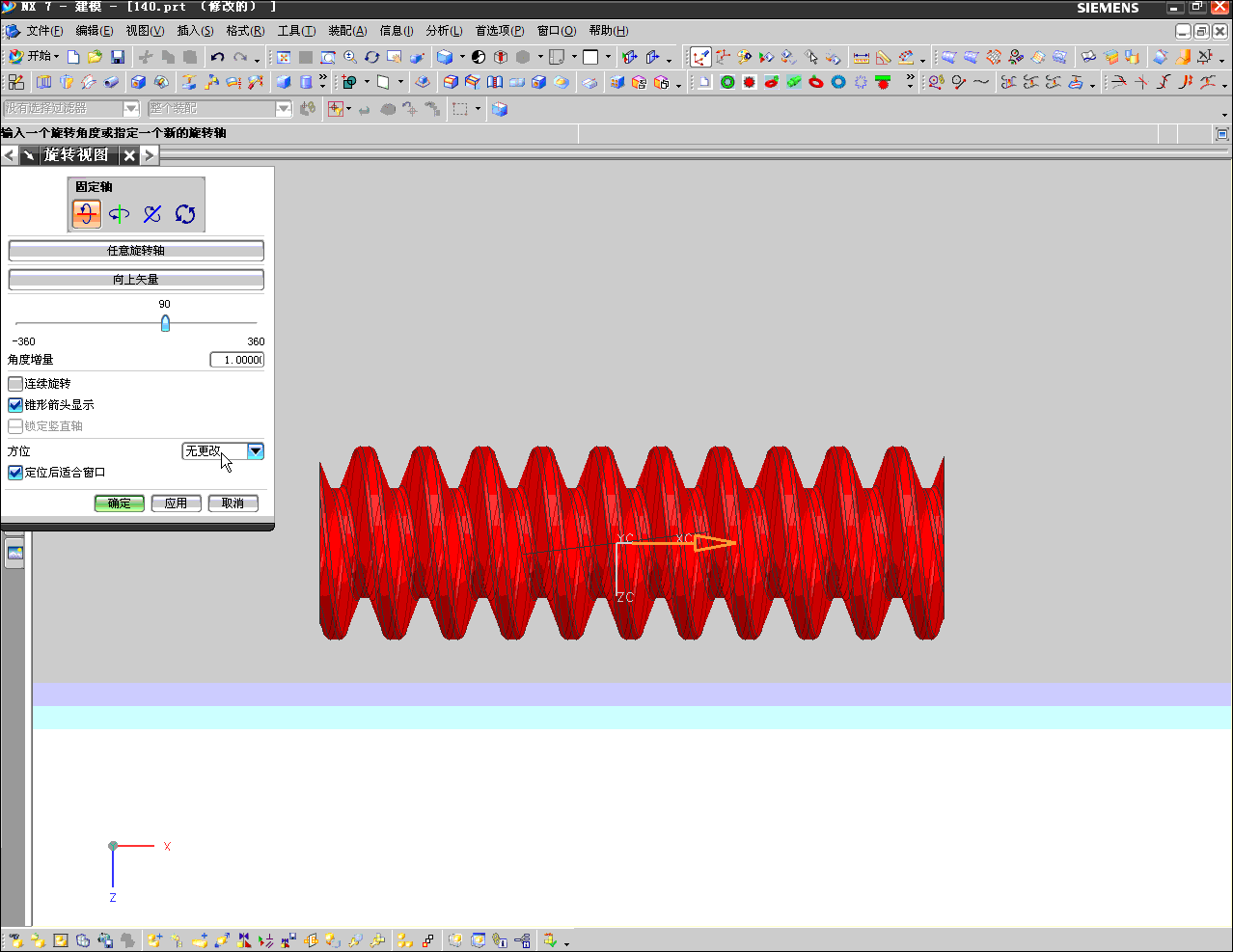
Narysuj płaszczyznę na środkowej części zazębienia na rysunku i przekształć ją w półprzezroczysty i kontrastowy kolor na rysunku, a następnie pozwól jej obrócić ślimak o kąt wznoszący się wokół linii pionowej od środka koła zębatego do ślimaka, który znajduje się w położeniu płaszczyzny normalnej, jak pokazano na poniższym rysunku:
Po zabiegu, należy zaznaczyć parę transmisyjną, która ma zostać sprawdzona pod kątem zazębienia, kolorem kontrastowym, a jedną z nich oznaczyć jako półprzezroczystą, aby wyraźnie widać było ruch położenia zazębienia w całym procesie symulacji dynamicznej. Jak pokazano poniżej:
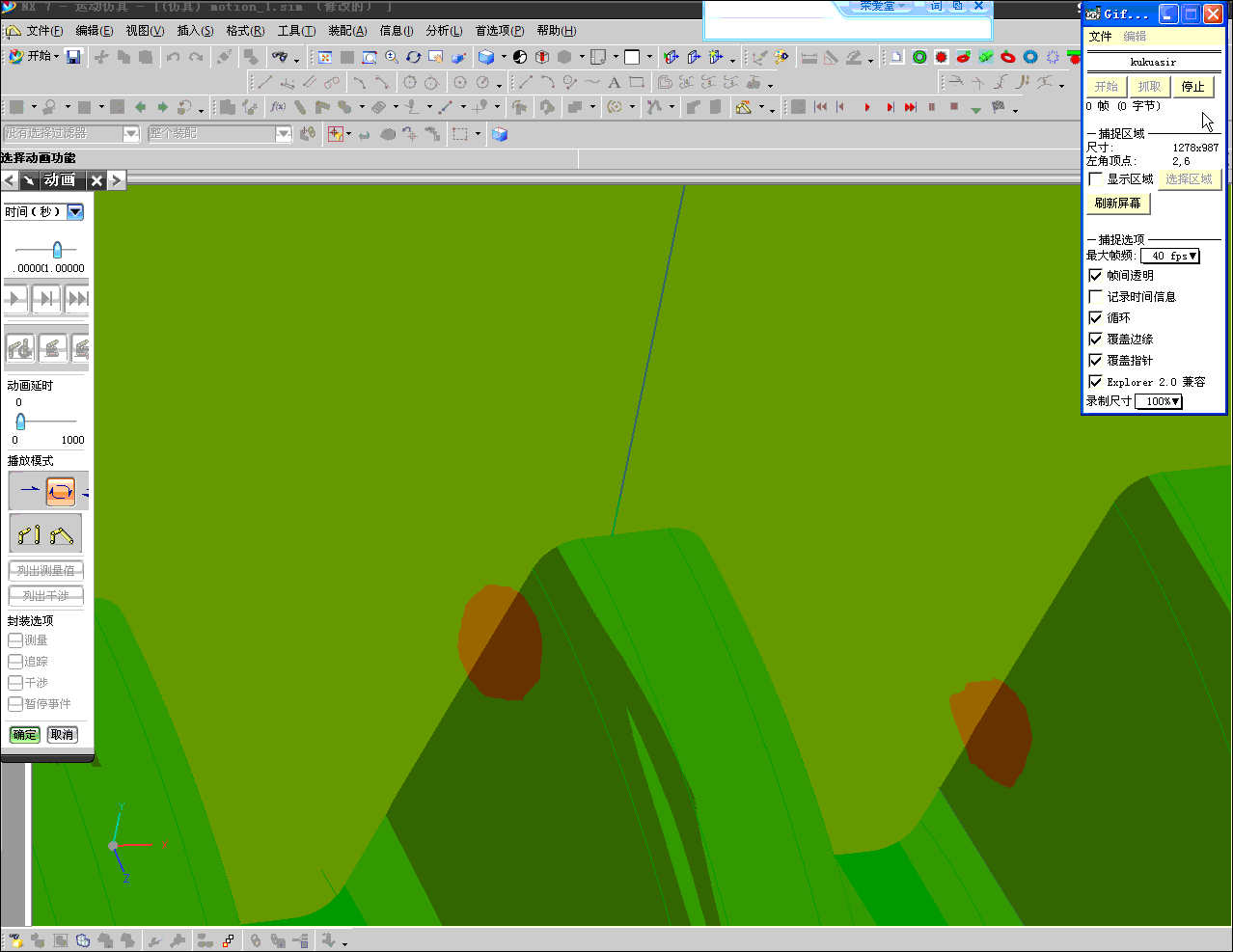
Podczas ruchu punktu styku siatki o wyraźnie kontrastowym kolorze można zauważyć, że przechodzi on przez normalną blachę.
Rekordy obliczone w powyższym przykładzie:
Wstępny zapis obliczeń ślimaka ewolwentowego z przekładnią śrubową
dane wejściowe
Moduł normalny: 6 Średnica koła indeksującego ślimaka: 5 Liczba głowic ślimakowych: 1 Liczba zębów koła zębatego śrubowego: 40
Kąt nacisku normalnego: 20 mm, kąt pochylenia śruby koła zębatego: 6,89210257934639
Dane obliczeniowe
Moduł normalny: sześć
Moduł osiowy: sześćset cztery biliony trzysta sześćdziesiąt siedem miliardów dwieście dwadzieścia trzy miliony dziewiętnaście tysięcy trzydzieści pięć
Kąt wznoszenia gwintu: 6,89210257934639
Kierunek spiralny: przekładnia ślimakowa i śrubowa znajdują się w tym samym kierunku
Odległość środka zerowego przemieszczenia: 14,5873444603807
Odległość między środkami pary przekładni wejściowych: 14,75
Równoważna liczba zębów śruby: 8,27311576399391
Kąt nacisku osiowego ślimaka: 20,1339195068419
Współczynnik ugięcia promieniowego koła zębatego śrubowego: dwa tysiące siedemset jedenaście
Kąt pochylenia ślimaka: 83,1078974206537
Podstawowe parametry robaka 83.10789742065361
Średnica główna ślimaka: 6,2 Średnica mniejsza ślimaka: 3,5 Liczba zębów ślimaka: 1
Moduł normalny ślimaka: 6 Kąt nacisku normalnego ślimaka: 20 Średnica okręgu indeksującego ślimaka: 5
Współczynnik przemieszczenia promieniowego ślimaka: 0 Średnica okręgu podstawy ślimaka: 1,56559093858108
Moduł końcowy ślimaka: 5 moduł osiowy ślimaka: sześćset cztery biliony trzysta sześćdziesiąt siedem miliardów dwieście dwadzieścia trzy miliony dziewiętnaście tysięcy trzydzieści pięć
Kąt nacisku osiowego ślimaka: 20,1339195068419 Kąt nacisku powierzchni czołowej ślimaka: 71,752752179164
Normalna grubość zęba koła indeksującego ślimaka: 942477796076937 pomiar wysokości zęba koła indeksującego ślimaka: sześć
Kąt wznoszenia gwintu koła indeksującego ślimaka: 6,89210257934639 Kąt linii śrubowej koła indeksującego ślimaka: 83,1078974206537
Efektywna długość zęba ślimaka: 25
Przewód ślimakowy (osiowy): 1,89867562790706
Podstawowe parametry przekładni śrubowej
Średnica główna koła zębatego śrubowego: 25,7 Średnica mniejsza koła zębatego śrubowego: 23 Liczba zębów koła zębatego śrubowego: 40
Moduł normalny koła zębatego śrubowego: 6 Kąt nacisku normalnego koła zębatego śrubowego: 20 Współczynnik modyfikacji koła zębatego śrubowego: dwa tysiące siedemset jedenaście
Średnica koła indeksującego koła zębatego śrubowego: 24,1746889207614 Średnica koła podstawy koła zębatego śrubowego: 22,69738911811
Moduł powierzchni czołowej koła zębatego śrubowego: 604367223019035 Kąt nacisku powierzchni czołowej koła zębatego śrubowego: 20,1339195068419
Kąt śrubowy koła indeksującego koła śrubowego: 6,89210257934639 szerokość koła śrubowego: 10
Skok koła zębatego śrubowego (osiowy): 628,318530717958
Liczba zębów na wspólnej linii normalnej koła zębatego śrubowego: 5 Wartość nominalna wspólnej linii normalnej koła zębatego śrubowego: 8,42519
Liczba zębów na wspólnej linii normalnej koła zębatego śrubowego: 6 Wartość nominalna wspólnej linii normalnej koła zębatego śrubowego: 10,19647
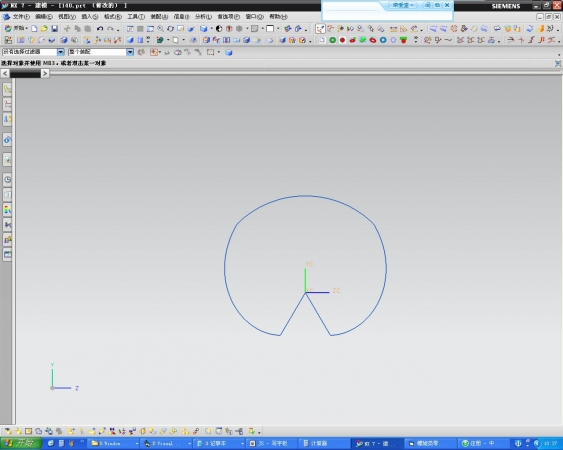
Schemat linii ewolwentowej czoła ślimaka używany do modelowania ślimaka ewolwentowego:
Czas publikacji: 11 czerwca 2022 r.